深蓝探秘者:1.5Kg微型机器人的万米海底奇幻之旅
3月25日消息,在地球最深的马里亚纳海沟万米深渊,这里环境极端恶劣,此前能够抵达这一深度的探测设备大多为数吨重的刚性体大型潜航器。这些庞然大物虽然具备强大的抗压能力,但其庞大的体积和重量也限制了它们的灵活性与应用场景。在我看来,随着科技的进步,未来或许可以开发出更加轻便且高效的深海探测工具,这不仅能降低探索成本,还可能带来全新的科学发现,为人类揭开深海奥秘提供更多可能性。同时,这也提醒我们,面对未知的世界,技术创新永远是推动探索前行的关键力量。

如今,这款名为“小精灵”的小型深海可变形机器人以其不到50厘米的身长和仅1.5千克的体重,成功突破了传统深海探测设备的局限,为深海探索领域注入了新的活力。这项创新成果已发表于《科学-机器人》期刊。 “小精灵”的问世标志着深海探测技术迈入了一个全新的阶段。在以往,深海探测往往依赖于庞大且昂贵的设备,而这些设备不仅操作复杂,还对环境条件有着极高的要求。“小精灵”的小巧设计让它能够轻松进入狭小的空间,适应复杂的深海环境,这无疑为科学家们提供了更灵活、更高效的工具。尤其值得一提的是,它的可变形特性使其能够在不同任务需求间迅速切换,这种灵活性是传统设备难以企及的。 我认为,“小精灵”的研发不仅仅是一项技术突破,更是人类探索未知世界的一次重要尝试。它让我们看到,科技创新可以以一种更加高效、便捷的方式服务于科学研究。未来,随着类似技术的进一步发展,我们有理由相信,深海的秘密将被揭开得更多、更快。同时,这也提醒我们,科技的进步需要与实际需求紧密结合,只有这样,才能真正发挥其价值,为社会创造更大的福祉。
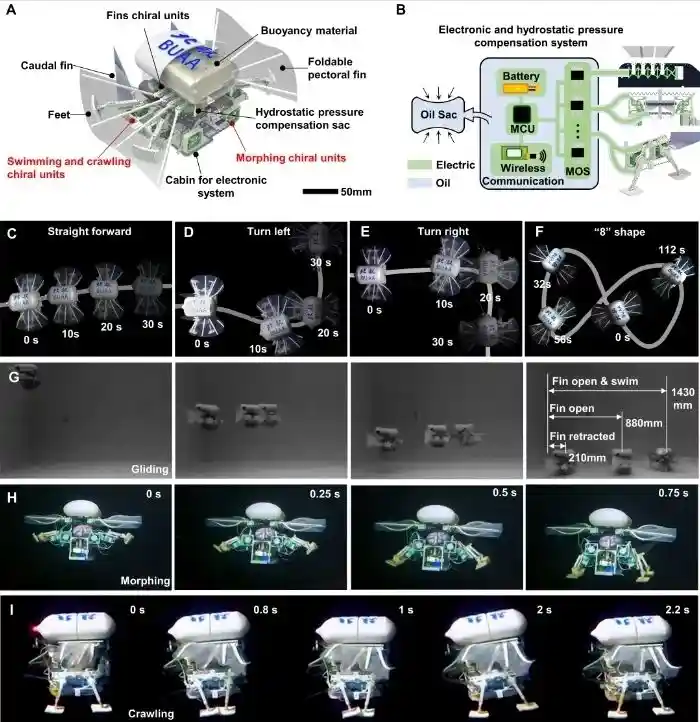
该机器人由北航等单位历时6年研发。团队从蝙蝠鱼运动模式获取灵感,设计出能够游动、滑翔、爬行的多模态机器人。
它能利用手性双稳态超材料结构实现0.75s内的游动-走动快速转换,适应不同的海底地形和任务需求。
深海高压环境对小型机器人构成严峻挑战,而柔性驱动器材料若模量升高,则会明显降低其工作效能。
为此,科研团队研发了一种全新的驱动装置,借助双稳态手性超材料在切换过程中产生的突跳效应,实现高效的动力输出。这一创新巧妙地将深海高压环境的不利影响转化为装置运行的助力机制。
深海低温环境中,研究团队巧妙运用形状记忆合金技术,借助周期性电流加热让其不断收缩与松弛,从而推动手性超材料单元变换状态,最终达成驱动器高效且稳定的往复摆动效果。这种创新方式不仅展现了材料科学与工程技术的深度融合,也为深海探索提供了全新的解决方案。在极端环境下,如何确保设备运行的稳定性和耐久性始终是科研人员面临的重大挑战,而这项技术突破无疑为相关领域的发展注入了新的活力。未来,随着这类智能材料应用范围的进一步拓展,我们有理由期待它们将在更多高难度场景中大放异彩。
未来,科研团队致力于增强深海小型机器人的能源持久性和移动效能,以拓展深海探测与监测的覆盖范围,推动海洋资源开发、水下考古以及生态环境监控等领域的发展。
免责声明:本站所有文章来源于网络或投稿,如果任何问题,请联系648751016@qq.com
页面执行时间0.008672秒