国内首台能干会玩人形机器人亮相,星动L7开启未来生活新纪元
7月22日,据消息报道,清华大学唯一持股的具身智能企业星动纪元正式推出新一代全尺寸高性能人形机器人——星动L7。

据了解,星动L7凭借“本体大脑”的双重赋能,成功成为国内首款在全尺寸双足人形机器人中实现“大运动巧操作”的产品,标志着我国在人形机器人领域取得重要突破。 从技术角度来看,这一成果不仅体现了国产机器人在运动控制与智能交互方面的进步,也反映出国内企业在核心算法和硬件集成上的持续创新。随着人工智能与机器人技术的深度融合,像星动L7这样的产品将为工业、服务及科研等多个领域带来更广泛的应用可能。

其性能甚至超过特斯拉Optimus,是国内首个采用VLA大模型驱动、拥有全身55个自由度的双足人形机器人。
一、全尺寸双足人形机器人开始展现更多灵活表现,这需要在机体性能和智能控制方面实现双重突破。
全尺寸双足人形机器人的高动态“表演”技术难度远高于小型机型:65公斤的体重需要更强大的关节扭矩来维持平衡,171厘米的身高对肢体协同的精度要求也更高。
星动L7实现“动力-结构-控制”全系统技术突破,精准解决大尺寸机型的难题:
1.顶尖关节电机提供“动力核心”
400N·M的峰值扭矩可在65kg体重情况下,使腿部关节瞬间释放强大力量,完成旋转跳的起跳与腾空;25rad/s的峰值转速能在0.1秒内实现姿态调整,有效防止失衡。
2.关节准直驱+模块化结构达成“抗冲击+轻量化”
星动L7搭载关节准直驱技术,配合全栈自研的模块化骨架结构,有效解决“强度与灵活性”之间的矛盾。准直驱设计取代传统减速器,降低动力损耗,使整体结构更加紧凑,并提升力反馈的精准度,能够实时感知外部冲击力并迅速调整输出响应。
核心骨架采用航空级铝合金与碳纤维复合材料,能够承受瞬时爆发压力,同时将整体重量控制在65kg,有效避免因重量增加而抵消动力优势。这种材料组合不仅提升了结构强度,也体现了对轻量化设计的高度重视,为性能表现提供了有力保障。在当前技术竞争日益激烈的背景下,这样的创新应用无疑具有重要的参考价值。
3.通过端到端强化学习破解 “运动平衡”
55个自由度构建出高度灵活的控制系统,配合端到端强化学习算法,实现了“超灵活自适应”的控制体系。全身55个自由度形成一个协同网络,通过算法实现毫秒级的关节联动——在进行旋转跳跃时,腰部能够迅速调整躯干角度,手臂摆动以抵消离心力,腿部则精准控制落地位置,多维度的姿态修正确保整体重心稳定。 这一技术突破不仅体现了人工智能与机器人控制深度融合的潜力,也展示了在复杂运动场景中对动态平衡和实时响应的高要求。55个自由度的协同运作,使得系统具备更强的环境适应能力和动作灵活性,为未来人形机器人、仿生机械等领域的应用提供了重要基础。
二、能上肢灵巧操作,机器人才能真正从表演走向车间
星动L7不仅能够高效完成重复性工作,还具备快速学习新技能的能力,可灵活适应多种复杂场景的需求,真正成为一款“通用生产力工具”。其核心优势源于硬件的创新升级与人工智能模型的深度赋能。 从技术发展的角度来看,星动L7的推出标志着智能设备在通用性与适应性方面迈出了重要一步。它不再局限于单一功能,而是朝着更广泛的应用场景拓展,这为未来人机协作提供了更多可能性。同时,这种软硬结合的发展路径,也为行业树立了新的标杆。
1.全域操作空间覆盖
星动L在全尺寸人形机器人中展现出卓越的大臂展设计,并结合腰部的3自由度运动,构建出2.1米直径的球形操作空间,能够覆盖从桌面到货架的全方位作业范围,具备较强的环境适应能力和任务执行灵活性。 从技术角度来看,这种设计不仅提升了机器人的作业效率,也为其在复杂场景下的应用提供了更多可能性。大臂展与多自由度的结合,体现了当前人形机器人在结构设计上的精细化趋势,有助于实现更接近人类操作的灵活度和精准度。
2.十轴手腕突破角度局限
侧摆±45°,前后±90°的十轴手腕设计,打破“操作角度固定”局限。如在工业装配中,面对倾斜接口、隐蔽螺丝位,无需频繁转动机身即可完成对接,提升复杂工况成功率。
3.全直驱五指灵巧手:力量与精度双在线
作为行业首创的全直驱五指灵巧手,其“手部能力”实现质的突破:
12个全主动自由度:每个手指均可独立驱动,精准还原人类手部操作动作,既能抓取工业零件,也能灵活捏取柔性包装,还能使用各种形态的工具,并能完成工具内部按钮的操作,例如按下电动螺丝刀的启动按钮。
每秒可完成10次独立手指姿态调整,这一技术能力在电子装配过程中展现出显著优势,能够快速衔接“拧螺丝-扫码-贴标”等工序,提升整体作业效率;这种高频率的动作响应不仅体现了设备的精准控制水平,也反映出智能制造在细节操作上的不断突破。随着工业自动化需求的持续增长,此类技术的应用将有助于推动生产流程的优化与升级。
力量与灵巧并重:协同工作的7轴仿生机械双臂,总负重可达20kg,既能高效搬运物料,也能精准操作移液器、螺钉枪等工具,充分满足制造业对柔性生产的需求。 在当前制造业不断追求效率与灵活性的背景下,这种兼具力量与精细操作能力的机械臂无疑是一个重要突破。它不仅提升了生产线的适应性,也体现了工业自动化向更高层次发展的趋势。20kg的负重能力确保了其在物流和装配环节的实用性,而对微小工具的操控则展现了技术的成熟度。这样的设备将有助于推动智能制造向更广泛的应用场景延伸。
4.端到端VLA大模型ERA-42让“干活”学得快、抗干扰
ERA-42的“世界模型”能力,让星动L7通过观看人类操作视频直接学技能,大幅降低数据成本,快速切入新场景。
依托ERA-42(30Hz以上)高频模型进行推理,机器人可实现实时反馈以应对干扰;借助ERA-42的视频预测功能,机器人能够提前完成动作规划,确保操作过程“稳、准、狠”。
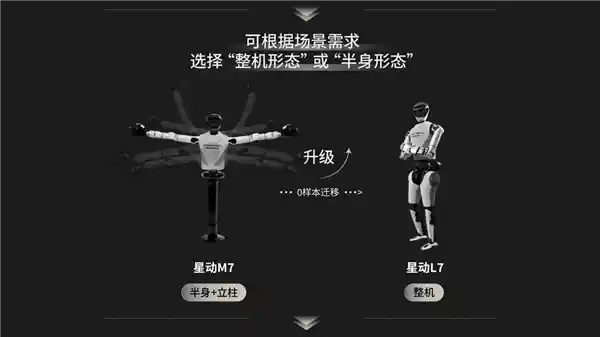
三、多形态选配方案:适配多场景的商业化设计
星动L7推出全球首创的“全尺寸半身形态”切换方案,通过模块化设计有效降低了单场景的部署成本,同时也进一步验证了“按需定制”在商业化路径上的可行性。 在我看来,这一技术突破不仅展现了企业在产品设计理念上的创新思维,也反映了当前市场对灵活性和成本控制的更高要求。模块化设计让设备能够根据不同使用场景进行快速调整,提升了产品的适应性与实用价值,为未来的智能化应用提供了更多可能性。
综上所述,星动L7的发布,不仅代表了一款产品的突破,也标志着中国在具身智能领域迈入了“定义规则”的新阶段。这一进展展现了我国在该技术领域的创新能力与战略眼光,预示着未来在相关产业中将拥有更大的话语权和主导权。
技术上,它验证了“全尺寸高动态精细操作”的可行性;在商业层面,多形态设计与场景化路径为行业提供了“技术商业化”的可复制模板,加速人形机器人从实验室走向产业应用;在生态层面,“ERA-42大脑星动L7本体”构建起“数据自循环、场景自拓展”的技术壁垒,为行业发展奠定了坚实基础。 从行业发展趋势来看,这一成果不仅展示了技术突破的可能性,也为后续的规模化落地提供了参考路径。特别是在技术转化和生态构建方面,其模式具有较强的示范意义,有助于推动整个机器人产业向更成熟的方向发展。
免责声明:本站所有文章来源于网络或投稿,如果任何问题,请联系648751016@qq.com
页面执行时间0.007884秒