《袁婷婷:激光雷达的远方迷局》
5月17日消息,目前辅助驾驶技术主要沿着两条路径发展。一条是以视觉为主的方案,特斯拉便是典型代表,其甚至舍弃了除摄像头以外的所有传感器。如今,这一做法已有了追随者。

另一种则以华为、理想等企业为代表,多数公司选择采用以激光雷达为核心的融合感知技术路线。
有趣的是,近日,小鹏汽车自动驾驶产品高级总监袁婷婷对小鹏汽车从激光雷达转向纯视觉方案的原因作出了解释。这一转变引发了外界的关注与讨论。在我看来,小鹏汽车的这一决策或许反映了其在自动驾驶技术路径上的深入思考和战略布局。 作为一家以技术创新为核心竞争力的企业,小鹏汽车显然在探索如何更高效地提升自动驾驶系统的性能与可靠性。激光雷达虽然在感知精度和环境适应性方面具有显著优势,但其高昂的成本以及复杂的技术集成可能限制了规模化应用的可能性。相比之下,视觉方案不仅成本更低,还能借助强大的算法优化实现类似甚至超越激光雷达的效果。这种转变不仅符合当前行业降本增效的趋势,也可能是小鹏汽车对未来市场需求和技术趋势的一种前瞻性布局。 值得注意的是,尽管激光雷达被放弃,但这并不意味着小鹏完全否定了其价值。相反,这或许表明企业希望在现有技术和资源基础上找到一条更具性价比的发展路线。未来,随着技术的进一步成熟,或许激光雷达仍有机会重新回归,成为辅助解决方案的一部分。 总体而言,小鹏汽车的这一决定既体现了对市场变化的高度敏感,也展现了其在技术选型上的灵活性与前瞻性。当然,最终效果如何,还需通过实际产品的表现来验证。无论如何,这场转变无疑为整个智能汽车行业提供了重要的参考案例。
她直接表示:激光雷达看得远是个伪命题。
以下是她关于该论点的介绍:
激光雷达是一种主动式传感器,它通过向外发射近红外光线并接收反射回波来测量时间-of-flight(飞行时间),从而确定障碍物的位置。这一工作原理可能会导致一些不足之处。
随着距离增加,激光束发散角扩大,导致能量密度呈平方反比衰减,在远距离测量时,回波信号强度和点云密度都大幅降低。
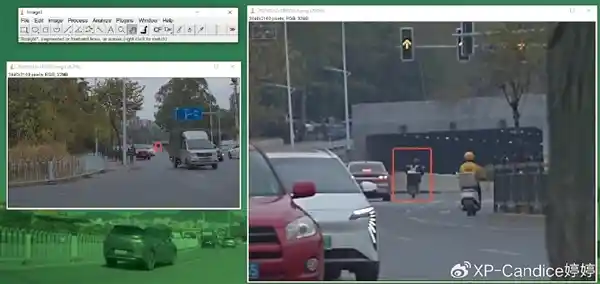
以目前行业内领先水平的192线激光雷达为例,200米外的物体,激光雷达能够采集到的信息与800万像素摄像头所采集到的信息可以进行如下对比。
但车辆必须获取充足的信息,才能判断200米外是随风飞舞的塑料袋,还是正在移动的电瓶车。
在讨论大模型方案时,很多人可能会优先考虑激光雷达作为检测远距离目标的主要传感器,但事实上,高分辨率摄像头可能更具优势。高分辨率摄像头能够捕捉到丰富的视觉信息,在良好的光照条件下,其探测精度甚至可以媲美激光雷达。此外,随着图像处理算法的不断进步,高分辨率摄像头不仅能提供清晰的画面,还能通过深度学习技术实现精准的目标识别与距离估算。 我认为这种趋势反映了技术发展的一个重要方向,即更加注重多模态融合与算法优化。虽然激光雷达在复杂环境下的稳定性无可替代,但在特定应用场景下,高分辨率摄像头凭借成本低、易集成等优点,展现出更大的潜力。未来,如何将两者的优势结合,形成互补效应,将是提升自动驾驶和智能系统性能的关键所在。
此外她还提到,激光雷达存在多径效应的问题,而且其帧率远远低于摄像头。
作为一种主动传感器,激光雷达在探测远距离复杂地形或障碍物时,容易出现多次反射现象,这可能导致回波信号发生混叠,从而使原始信号失真,甚至引发误判,影响对真实目标的精准识别与判断。
目前,主流激光雷达的处理帧率不到摄像头的一半,这种较低的帧率会使远距离且高速移动的物体识别误差进一步扩大。
200m开外的外卖小哥,小鹏lofic摄像头拍摄
同时,激光雷达对天气情况相当敏感,而穿透雨雾则主要依赖毫米波雷达。
近红外光的波长较短,依据波粒二象性原理,波长越短其粒子特性越显著,衍射能力则相对较弱。因此,在遭遇雨雪雾等恶劣天气时,近红外光容易在传感器周边几米范围内产生大量噪点,且难以穿透这些透明障碍物以观测到雾气后方的目标,从而导致设备“失明”。相较之下,毫米波雷达由于波长更长,具备更好的衍射性能,其在雨雾环境中的表现更为优异。
最终她得出结论,激光雷达是一种信息密度较低且容易受到干扰的传感器,不适合作为高级系统的视觉核心。
免责声明:本站所有文章来源于网络或投稿,如果任何问题,请联系648751016@qq.com
页面执行时间0.020365秒