智能驾驶,开启未来出行新篇章
3月18日消息,理想汽车自动驾驶研发团队近期在NVIDIA GTC 2025大会上带来了关于下一代自动驾驶技术MindVL的最新成果展示。这一技术的不断进步无疑为智能驾驶领域注入了新的活力。从贾鹏的演讲中可以看出,理想汽车正在通过持续的技术创新,努力解决自动驾驶中的复杂难题,并逐步提升用户体验。我个人认为,MindVL技术的推出不仅体现了理想汽车在自动驾驶领域的深厚积累,也展示了其对未来出行方式的大胆探索。随着这项技术的不断完善,我们有理由期待它能够为用户带来更加安全、便捷的驾驶体验,同时也推动整个汽车行业向着更智能化的方向迈进。
据悉,MindVLA是理想全栈自研的机器人大模型。
这款模型融合了空间智能、语言智能与行为智能,致力于把汽车从传统的交通工具升级为可靠的专属驾驶助手,它能够听懂指令、识别环境、规划路线。
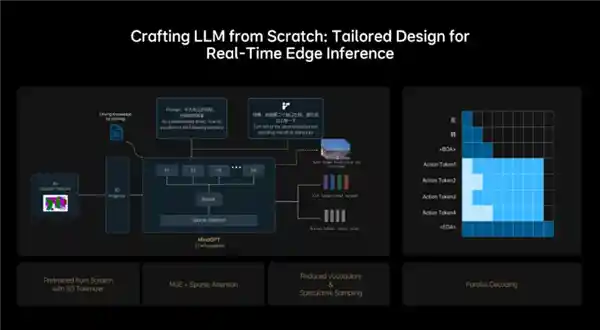
该技术基于端到端和VLM双系统架构,通过3D空间编码器和逻辑推理生成合理的驾驶决策,并利用扩散模型优化驾驶轨迹,整个过程需在车端实时运行。

MindVLA通过引入3D高斯作为核心表征方式,在海量数据的支持下开展自监督训练,这一创新方法大幅提升了其在下游任务中的表现。在我看来,这种技术突破不仅展示了人工智能领域对复杂数据结构建模的新思路,也证明了自监督学习在处理未标注数据时的强大潜力。随着更多应用场景的探索,相信MindVLA能够为行业带来更深远的影响,特别是在需要精准分析和高效处理多维度信息的任务中,它有望成为不可或缺的工具。
这款语言模型采用了先进的MoE(混合专家)架构与稀疏注意力技术,在保证模型规模持续扩大的同时,有效维持了推理效率的稳定性。这一创新设计不仅体现了技术上的突破,也展现了研发团队对实际应用需求的深刻理解。在当前人工智能飞速发展的背景下,如何平衡模型规模与运行效率始终是一个重要课题。该模型的成功实践表明,通过引入更高效的架构和技术手段,我们可以在不牺牲性能的前提下,推动更大规模、更高性能模型的应用落地。这无疑为未来人工智能技术的发展提供了新的思路和方向。
此外,MindVLA利用扩散模型将动作词元转化为优化轨迹,同时融合自车行为生成与他车轨迹预测,显著增强了在复杂交通环境下的博弈能力。这一技术突破不仅展现了人工智能在自动驾驶领域的巨大潜力,还为未来智能交通系统的构建提供了重要参考。 我认为,这项技术的核心优势在于它能够综合多种信息来源,从而更准确地预判道路情况并做出合理决策。特别是在城市拥堵路段或极端天气条件下,这种能力显得尤为重要。此外,随着算法不断迭代升级,相信它还能进一步降低交通事故发生率,提高整体通行效率。这不仅是科技进步的体现,也是对公共安全的一份责任承诺。
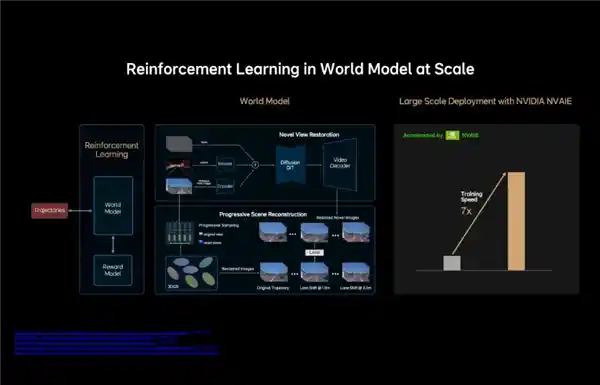
这项技术通过自主研发的重建生成系统,构建了云端统一的世界模型,从而实现了大规模的闭环强化学习,显著提升了场景重建与生成的效率。在我看来,这种技术突破不仅展示了人工智能在复杂环境建模中的巨大潜力,也为未来的虚拟现实和增强现实应用奠定了坚实的基础。随着技术的不断进步,我们有理由相信,它将在更多领域发挥重要作用,为用户提供更加丰富和真实的交互体验。同时,这也提醒我们在技术发展的同时,需要关注其可能带来的伦理和社会影响,确保技术的应用始终服务于人类的福祉。
MindVLA技术赋能的智能汽车不仅能够通过语音指令灵活调整行驶路线与驾驶行为,还具备强大的图像识别能力,可依据拍摄的照片精准判断用户当前位置,并自动完成停车入位的操作。这项技术的应用无疑为驾驶者提供了极大的便利,尤其是在陌生环境或停车场内,它能有效减少寻找停车位的时间和精力消耗。不过,我也注意到,在享受这些智能化功能带来的便捷的同时,如何确保数据安全与隐私保护仍是需要重点关注的问题。毕竟,涉及语音输入和图像采集的技术,可能会无意间收集到用户的敏感信息。因此,相关企业应进一步完善技术方案,建立更加透明且严谨的数据管理机制,以赢得消费者的长期信任。
这项技术不但将革新用户的使用感受,而且会重新塑造自动驾驶的未来,对汽车制造业和人工智能行业产生重大而深远的影响。
免责声明:本站所有文章来源于网络或投稿,如果任何问题,请联系648751016@qq.com
页面执行时间0.031696秒